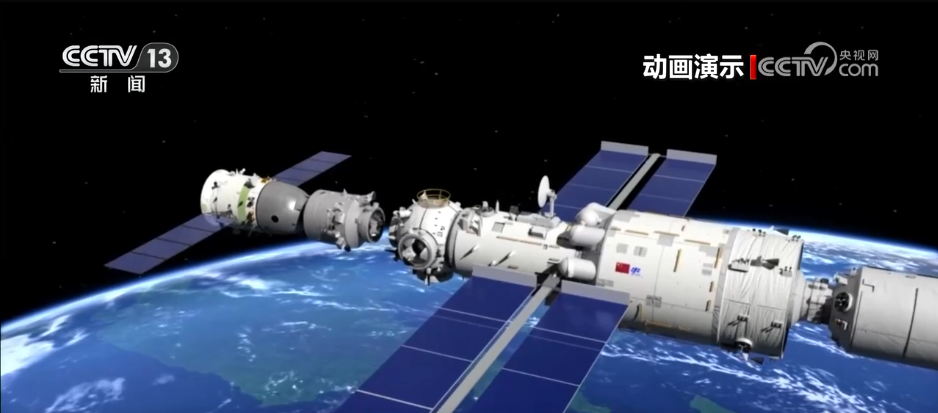
央视网消息:此次载人航天任务,神舟二十三号载人飞船与空间站组合体又一次实现完美对接。这背后离不开国产核心装备激光交会对接雷达的助力,从一片空白到不断迭代,激光交会对接雷达是如何一步步精准引导“太空穿针”的呢?
早年间,我国太空交会对接测量领域几乎一片空白,没有成熟产品、没有可参考标准,更没有在轨运行经验。初代产品首要目标是解决“有无问题”,研发团队从原理验证、地面仿真、环境模拟试验一步步突破。
中国电科27所激光雷达项目总设计师李磊表示,刚开始做的时候,就是天地的差异。所以当时课题组到青海或者云南那边去找尽可能跟太空类似的天气,再通过仿真、数学模型来推导出在地面上能测多远,到太空能测多远。
2011年,神舟八号飞船与天宫一号成功完成刚性连接,形成组合体,交会对接激光雷达首战告捷。2021年,神舟十三号载人飞船首次以径向交会对接的方式实现与天和核心舱的连接。激光雷达始终保持对预设目标的稳定跟踪,并在预设切换点迅速完成不同合作目标间快速切换。2023年,交会对接激光雷达成功进行了神舟十六号与空间站核心舱径向端口交会对接的精确引导,完成了中国空间站应用与发展新阶段的首次载人任务。
中国电科27所激光雷达项目副总设计师赵明福表示,以前,天宫基本上就只有一个对接口,到空间站的时候,后向、前向、径向,还有中间的绕飞。这些需求不断变化,通过更新软件,把这些需求实现了。
新闻链接:激光交会对接雷达有多“神”
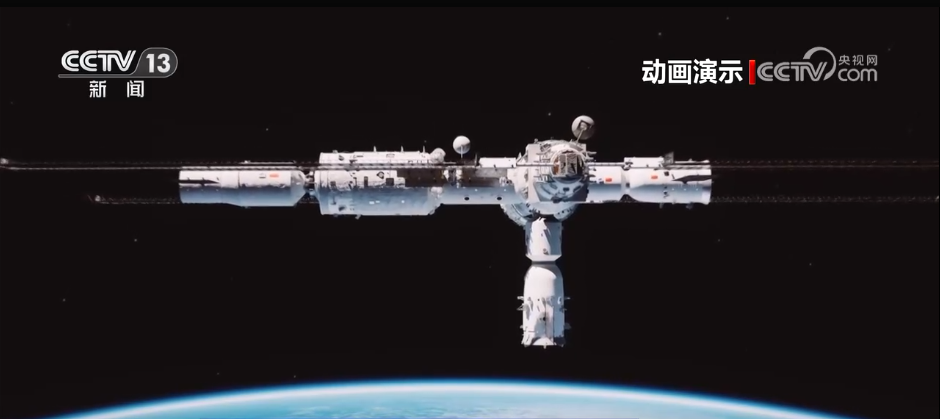
在交会对接过程中,飞船需要面对空间站前向或径向多个对接目标,有时候还要做出绕飞的动作,面对空间站多个对接口、多组合作目标,交会对接雷达是怎么做到不跟丢的呢?
目前,神舟载人飞行任务采用3.5小时快速对接,速度的提升是整个系统高精度协同工作的结果。对激光雷达而言,不仅要像以往一样捕得快、跟得稳、测得精,更要在面对我国空间站多个对接口的绕飞对接过程中不迷路。
中国电科27所激光雷达项目总设计师李磊表示,当时为了绕飞功能,科技人员也做了很多的技术提升和改进。比如激光雷达本身就具有高精度的三维成像能力,然后在空间站布设了好几组合作目标,然后又把它设计成了视场的精确拼接。这样在绕的过程中始终能看到目标,在这个过程中又能做到丝滑切换。
飞船绕飞对接时姿态多变、视角不停切换,激光雷达利用高精度三维成像能力,配合空间站多个对接口布放的大小合作目标组,分工合作。大视场负责全域搜索,小视场负责精准捕获,实现跟踪连续不中断。一旦出现因大姿态调整短暂失去目标,雷达可自主全域扫描,结合三维成像与特征快速找回目标,确保绕飞全程“不迷路”。




 贵公网安备52011302005168号
贵公网安备52011302005168号