央視網消息:太空採礦,這個以往在科幻小說和電影中出現的場景正在逐步走向現實。前不久,中國首台太空採礦機器人在中國礦業大學誕生。三輪足三爪足 適應太空微重力環境
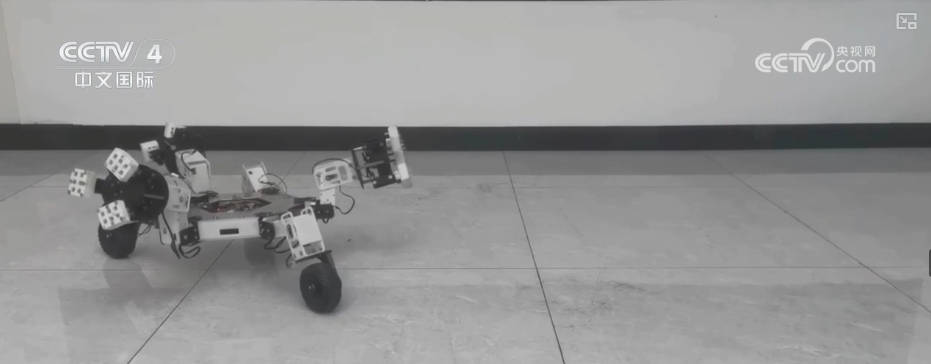

這就是中國礦業大學劉新華教授團隊研發的多功能太空採礦機器人。與時下火爆的人形機器人以及機器狗等不同,太空採礦機器人的基本形態為六足模式,有三個輪足和三個爪足。劉新華教授介紹,之所以這樣設計,主要是為了適應太空中的微重力環境。模擬昆蟲爪刺結構 爪刺足抓地能力更強
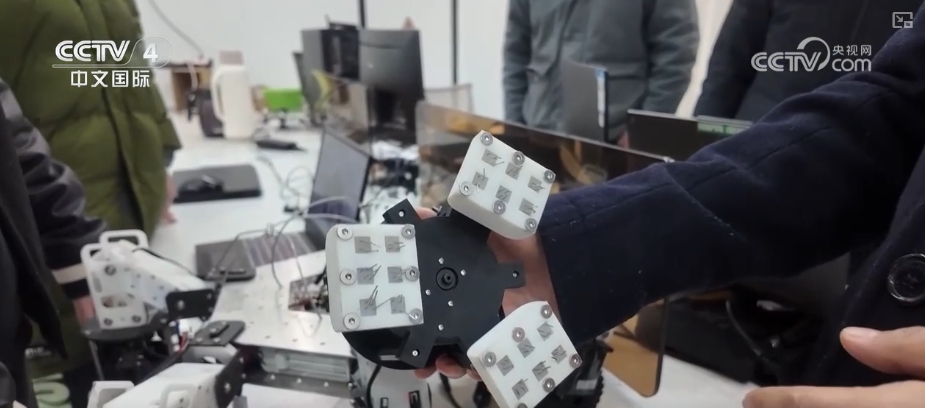
太空採礦機器人要在地外星體上完成地質勘探和礦物採集任務,鑽探屬於必備技能。在地球重力環境下,機器人本身的重量就足以支撐鑽頭鑽進。而月球重力只有地球的六分之一,小行星上大多是低微重力,如何讓鑽頭順利鑽進星體表面就成了大問題。為了解決失重帶來的漂移,科研團隊想到了模擬昆蟲的爪刺結構,於是為太空採礦機器人設計了特殊的爪刺足。

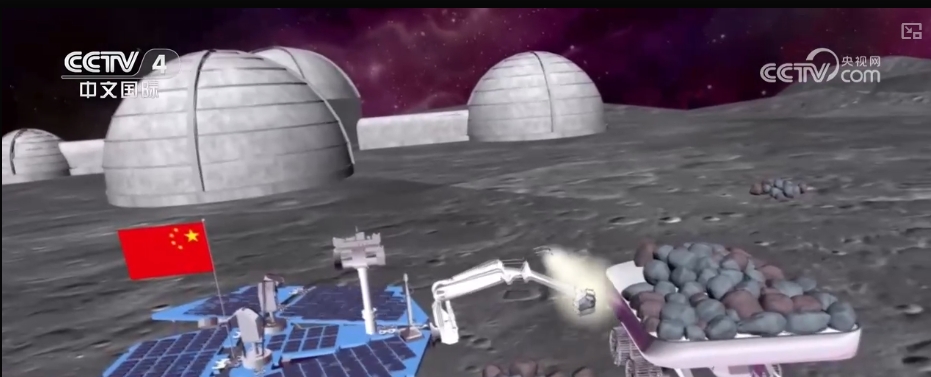
專家介紹,在有限的地球資源最終將面臨枯竭困境的威脅下,人類走向太空是必然選擇。月球作為地球唯一的天然衛星,同時具有距地球相對較近的優勢和豐富的資源。目前,對月球資源的探索研究全球關注度最高,科研投入也最大。月球資源或成人類最先開發利用的太空資源

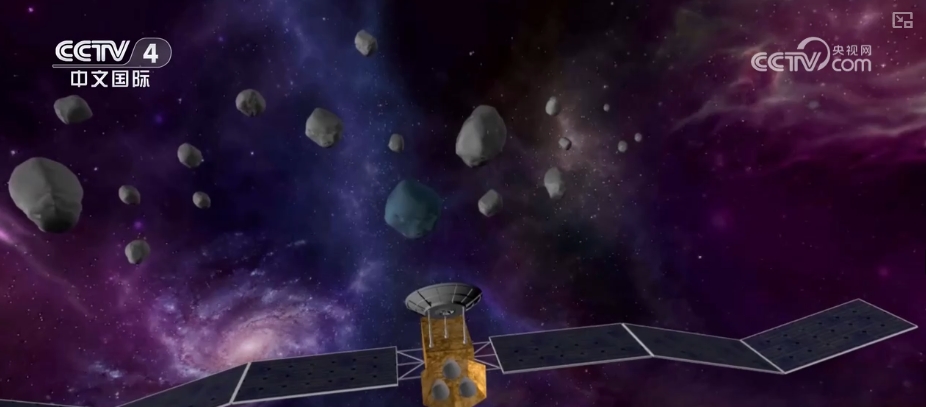
此外,太陽系中數量眾多的小行星也蘊藏著豐富的礦產資源。其中,近地小行星運行軌道距離地球較近,同樣開發利用相對便利。目前,已初步掌握有1500多顆近地小行星具有非常高的開採價值和可採性。